
Nut/OS Events
This paper provides an overview of Nut/OS event handling internals.
Basically Nut/OS thread scheduling can be understood as handling events by moving threads among queues. A thread waiting for an event is blocked by moving it from a global ready-to-run queue to a queue, that is expected to receive this event.
Linked Lists of Threads
During system initialization, the idle thread is created first, which in turn creates the main application thread. Depending on the Nut/OS components used by the application, the system may create additional threads like the DHCP client or the Ethernet receiver thread. Applications can create more threads by calling
HANDLE NutThreadCreate(u_char * name, void (*fn) (void *), void *arg, size_t stackSize);
When successful, NutThreadCreate returns a handle, in fact
a pointer to the NUTTHREADINFO structure of the new thread.

Each time, when Nut/OS creates a new thread, a NUTTHREADINFO
structure is allocated from heap memory and and added in front of a
linked list containing all existing threads. The global pointer
nutThreadList points to the first entry.
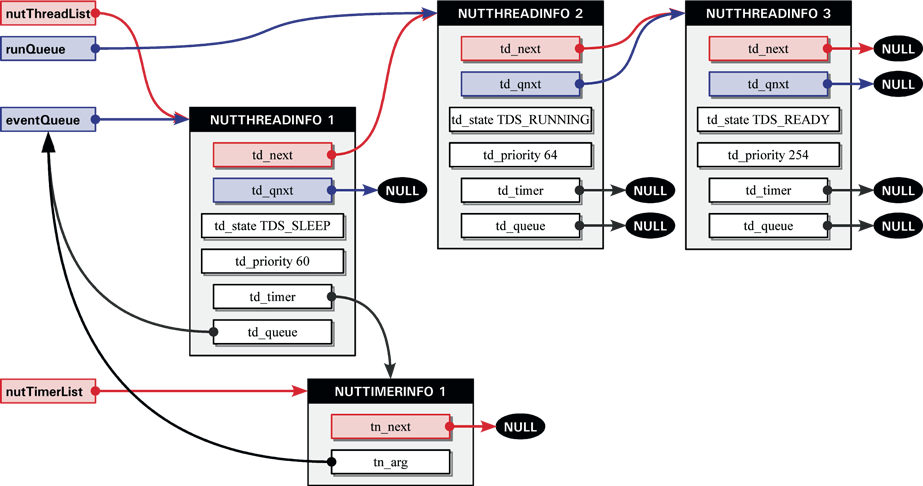
To keep things simple, the following diagrams will show the relevant structure members only. Furthermore, let's assume, that only three threads have been created, the idle thread, the main application thread and an additional thread created by the application. This will result in the following list of threads.

The pointer nutThreadList points to a list, which contains
all three threads. This list is linked by the structure element
td_next (red colored links). The last NUTTHREADINFO
structure is always the one of the idle thread.
We notice, that there are more lists. The global pointer runQueue
points to the list of all threads, which are ready to run and linked by
td_qnxt (blue colored links). In opposite
to nutThreadList, new entries are not simply added to the front.
This list is always sorted by the value of td_priority. In Nut/OS,
low values mean high priority. The idle thread is running at lowest
priority 254. Again to keep the follwing diagrams simple, the priority
order is the same as the list of all threads. In reality this is
usually not the case.
Waiting for an Event
The runQueue does not always contain all existing threads, but
only
those which are ready to run. One of its entries must have the state
TDS_RUNNING and all remaining entries in this queue are in state
TDS_READY. Threads with state TDS_SLEEP will never be
part of
the runQueue.
If a thread directly or indirectly calls
int NutEventWait(HANDLE * qhp, u_long ms);
NUTTHREADINFO structure will be removed from
this list of ready-to-run threads.
The first parameter of NutEventWait is a pointer to a pointer to
a linked list (HANDLE is defined as a void pointer). This parameter is
used in a similar way as runQueue, but instead of listing all
ready-to-run threads, it contains a list of threads waiting for a specific
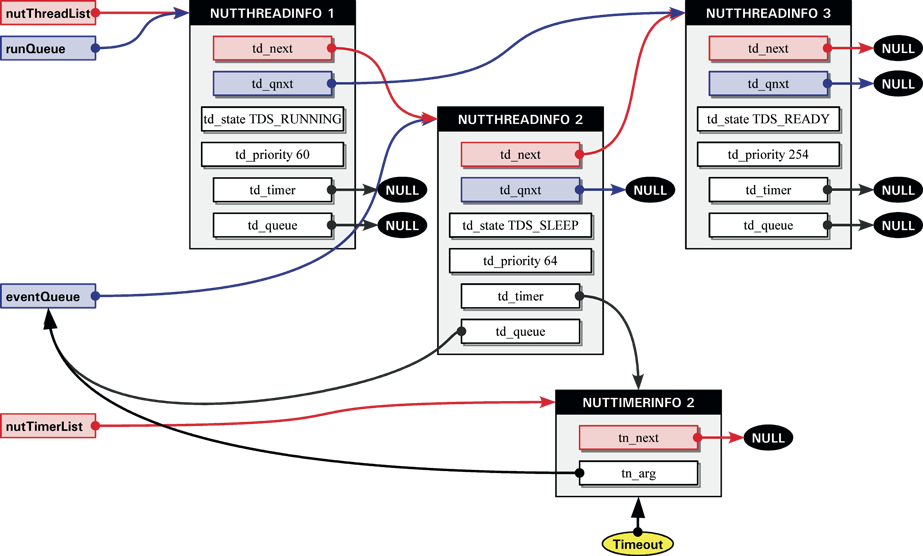
event. In our example the thread with the highest priority called
HANDLE eventqueue = 0; NutEventWait(&eventQueue, 1000);
runQueue and added to eventQueue.
Internally, NutEventWait executes
NutThreadRemoveQueue(runningThread, &runQueue); runningThread->td_state = TDS_SLEEP; NutThreadAddPriQueue(runningThread, (NUTTHREADINFO **) qhp);
runQueue,
change its state from TD_RUNNING to TDS_SLEEP
and to add it to the eventQueue.
The second parameter of NutEventWait specifies the maximum
time the thread is willing to wait for an event posted to the queue.
If this parameter is zero, the thread will wait without time limit.
Otherwise it is interpreted as the number of milliseconds to wait and
Nut/OS will create a timer in this case.
Like threads, timers are created by allocating a NUTTIMERINFO from
heap memory and adding it to a linked list. The global pointer nutTimerList
points to the first entry and following entries are linked by the
pointer tn_next, which is a member of NUTTIMERINFO.
If a timeout is specified, NutEventWait calls
HANDLE NutTimerStart(u_long ms, void (*callback) (HANDLE, void *), void *arg, u_char flags);
NUTTIMERINFO structure and adds it to nutTimerList.
We will discuss the situation in case of a time out later in more detail.
Finally, NutEventWait calls
NutThreadSwitch();
runQueue from TD_READY to
TD_RUNNING and loads the CPU registers for the stack of
this thread.
In this document I will not describe in detail, how Nut/OS switches
from one to another thread. In fact, NutEventWait will not return
immediately, because the CPU starts execution of the second thread.
Let's assume, that our second thread directly or indirectly calls NutEventWait
too on the same eventQueue.
NutEventWait(&eventQueue, 1000);
NUTTHREADINFO structure from the runQueue to this
eventQueue, does the required updates of td_state,
creates another timer and finally passes control to the last thread.

As described above, the last thread is the idle thread, which will never
be removed from the runQueue. It serves as a placeholder during
times,
when all worker threads are sleeping. It keeps the CPU busy by calling
NutThreadYield in an endless loop. As soon as another thread
becomes
ready to run, the idle thread will lose CPU control. In our case, this may
happen as soon as an event is posted to the eventQueue.
Posting an Event
In order to wake up a thread waiting in an event queue, a thread calls
int NutEventPost(HANDLE volatile *qhp);
NUTTHREADINFO structure in front of this
priority ordered linked list to the runQueue. As we already know,
the runQueue is also ordered by priority. If the thread, which
called NutEventPost, has a lower priority than the woken up
thread,
CPU control is passed to the latter.
Alternatively a thread may call
int NutEventBroadcast(HANDLE * qhp);
runQueue.
In our given example, only the idle thread is left.
When the idle thread is doing nothing except calling NutThreadYield
in
a loop, who is posting an event while both worker threads are sleeping? Well,
there are two special calls, which can be called from within interrupt
routines.
int NutEventPostAsync(HANDLE volatile *qhp); int NutEventBroadcastAsync(HANDLE * qhp);
NutEventPost and NutEventPostAsync
is,
that Nut/OS will move the NUTTHREADINFO structures and update the
td_state values, but will not switch the CPU control. This is
actually
done when the idle thread calls NutThreadYield. Nut/OS provides
cooperative
multithreading, which means, that a thread can rely on not losing CPU control
without calling specific system function which may change its state. However,
interrupts are preemptive in any case. By delaying the context switch,
Nut/OS ensures, that cooperative multithreading is maintained even when
interrupts are able to wake up sleeping threads.
So far let's assume, that in our example some kind of smart interrupt
routine posts an event to eventQueue by calling
NutEventPostAsync(&eventQueue);
runQueue.
If an event is posted to the eventQueue before the timer elapses,
then the NUTTIMERINFO will be removed from the nutTimerList
by a call to
NutTimerStopAsync(td->td_timer);
Event Timeout
In detail, NutEventWait calls
td_timer = NutTimerStart(ms, NutEventTimeout, (void *) qhp, TM_ONESHOT);
nutTimerList
after the timer elapsed.
Obviously the most interesting parameter is the callback routine
void NutEventTimeout(HANDLE timer, void *arg);
NUTTIMERINFO). In our example, the timer handle is the same,
that had been
previously stored in td_timer and the arg points to
eventQueue.
The NutEventTimeout will walk through this queue, searching for
the
NUTTHREADINFO structure that contains a td_timer with
the same
timer handle. If it is not found, the routine doesn't care. It simply means,
that an event already removed the thread from the queue. Nothing else can be
done,
because the Nut/OS timer handling will automatically remove oneshot timers.
If it is found, td_timer will be cleared and the NUTTHREADINFO
structure will be moved to the runQueue.
Remember, that NutEventTimeout is running in interrupt context. So
it
will not perform any thread switching. As soon as the running thread calls
any such function, a thread switch may occur. In our example, this will
not happen, because the currently running thread got a higher priority.
Later on, CPU control will be (hopefully) passed to the second thread, which
then
continous to execute NutEventWait. This routine will check whether
it had
been called with a timeout value and td_timer had been cleared to
zero.
In this case it returns -1 to inform the caller, that a time out occured.
Otherwise
zero will be returned.
Problem Discussion
At the time of this writing, Nut/OS is at version 3.9.2.
Problem 1: Not yet verfied, but it looks like events are sometimes
lost
when a timeout value has been specified. With most applications this is no
real problem, because the timeout will avoid complete blocking of the
thread.
Problem 2: Several variables and parameters are marked volatile.
However,
cooperative multithreading requires a volatile attribute for variables only,
if they are modified in interrupt routines.
Harald Kipp
Herne, October 9th, 2004.